
傾儖僑僗僔僗僥儉傪梡偄偨傾僆僂儈僈儊偺峴摦寳悇掕
偼偠傔偵
丂傾僆僂儈僈儊偺曐岇巤嶔乮摿偵曐岇嬫堟乯傪専摙丒愝掕偡傞偵偁偨偭偰丄僂儈僈儊偑丄偳偺抧堟傪偳傟偩偗棙梡偟偰偄傞偐抦傞偙偲偑廳梫偲側傝傑偡丅偙偺摦暔偑偳偺晹暘傪偳傟偩偗棙梡偡傞偐抦傞曽朄偺傂偲偮偲偟偰峴摦寳悇掕朄偑偁偘傜傟傑偡丅摦暔偺惗懅応偺拞偱丄嵦塧傗巕堢偰側偳捠忢棙梡偡傞応強傪峴摦寳偲屇傃傑偡丅峴摦寳偵偼丄堏摦側偳堦帪揑偵偟偐棙梡偟側偄晹暘偼娷傔傑偣傫丅峴摦寳悇掕朄偼丄娤嶡揰偺奜妔傪峴摦寳偲偡傞曽朄傗丄妋棪枾搙偱峴摦寳傪悇掕偡傞曽朄側偳條乆側悇掕朄偑偁傝傑偡丅俽俤俙俽俿俙俼偱偼丄傾儖僑僗僔僗僥儉傪梡偄偰傾僆僂儈僈儊偺夞梀捛愓挷嵏傪峴偭偰偄傑偡丅偦偙偱丄傾儖僑僗僔僗僥儉偐傜摼傜傟偨埵抲忣曬傪棙梡偟偰傾僆僂儈僈儊偺峴摦寳傪悇掕偟傑偟偨丅
傾儖僑僗僔僗僥儉偺岆嵎
丂傾儖僑僗僔僗僥儉偵傛偭偰摼傜傟傞埵抲忣曬偵偼丄杮僔僗僥儉偺應埵尨棟忋丄岆嵎偑娷傑傟偰偄傑偡丅埵抲忣曬偵偼丄岆嵎偺掱搙偵傛偭偰傾儖僑僗幮偐傜儘働乕僔儑儞僋儔僗偲偄傢傟傞岆嵎僋儔僗偑曐徹偝傟偰偄傑偡乮昞侾乯丅
丂
昞侾丏奺儘働乕僔儑儞僋儔僗偲岆嵎
俴俠俁丗侾俆侽倣埲壓
俴俠俀丗侾俆侽乣俁俆侽倣
俴俠侾丗俁俆侽乣侾侽侽侽倣
俴俠侽丗侾侽侽侽倣埲忋
俴俠俙丗曐徹偝傟側偄
俴俠俛丗曐徹偝傟側偄
丂奀梞摦暔傪懳徾偲偟偨尋媶偱偼丄憲怣婡偐傜偺傾僢僾儕儞僋偼屇媧晜忋帪偺嬐偐側帪娫偵尷傜傟偰偟傑偄傑偡丅廬偭偰丄摼傜傟傞僨乕僞偺懡偔偑丄岆嵎偑曐徹偝傟偰偄側偄俴俠俙傑偨偼俴俠俛偵側傝傑偡丅摦暔偺戝偒側堏摦僷僞乕儞傪抦傞偺偑栚揑偱偁傟偽丄岆嵎偺塭嬁偼戝偒偔側偄偺偱偡偑丄堏摦懍搙傗嵶偐偄僗働乕儖偺堏摦傪挷傋傞偲偒丄偙偺岆嵎傪偳偆懆偊傞偐偑廳梫偲側傝傑偡丅
丂杮尋媶偱偼丄岆嵎偑曐徹偝傟側偄俴俠俙偲俴俠俛偑幚嵺偳傟偔傜偄偺惛搙傪傕偭偰偄傞偺偐挷傋傞偨傔偵丄憲怣婡傪屌掕揰偵曻抲偟偨僨乕僞傪棙梡偟偰丄奺儘働乕僔儑儞僋儔僗偺岆嵎傪捈愙寁嶼偟傑偟偨丅憲怣婡偵傛偭偰丄偍偦傜偔抣偼堎側傞偲峫偊傜傟傑偡偑丄杮尋媶偱巊梡偟偨憲怣婡偼丄俴俠俙偼俴俠侾偵師偖惛搙傪帩偪丄俴俠侽偍傛傃俴俠俛偑斾妑揑戝偒側岆嵎傪桳偡傞僋儔僗偱偁傞偙偲偑暘偐傝傑偟偨丅偟偐傕丄岆嵎傪戝偒偔偟偰偄傞梫場偼丄俴俠侽偍傛傃俴俠俛偱偼旕忢偵戝偒側岆嵎傪帩偭偨忣曬偑偁傞昿搙偱庢摼偝傟傞偙偲偵偁傞偙偲偑暘偐傝傑偟偨乮恾侾乯丅偮傑傝丄偙偺旕忢偵戝偒側岆嵎傪庢傝彍偗偽偁傞掱搙偺惛搙傪傕偭偨忣曬傪妋曐偱偒傞偲峫偊傜傟傑偡丅杮尋媶偱偼堏摦懍搙摍偐傜旕尰幚揑側乮岆嵎偑旕忢偵偍偍偒偄乯僨乕僞傪庢傝彍偔嶌嬈傪峴偄傑偟偨丅
昞俀丂屌掕揰偵偍偄偨憲怣婡偐傜摼傜傟傞奺儘働乕僔儑儞僋儔僗偺惛搙
丂
丂
丂
丂
丂
丂
丂
丂
峴摦寳偺悇掕
峴摦寳偺悇掕偼丄俤俽俼俬幮偺抧棟忣曬僔僗僥儉夝愅僜僼僩乽俙倰們倁倝倕倵 3.0乿偲倀俽俧俽偑奐敪偟偨乽Animal Movement乿僄僋僗僥儞僔儑儞傪棙梡偟傑偟偨丅峴摦寳悇掕朄偼屌掕僇乕僱儖峴摦寳悇掕朄傪棙梡偟傑偟偨丅
悇掕寢壥
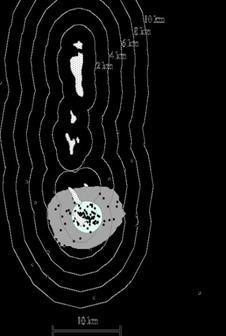
壓偺恾偼丄僼乕儓儞搰偱嶻棏偟偨偁傞屄懱偺嶻棏婜娫拞偺峴摦寳悇掕寢壥傪帵偟偰偄傑偡丅嶻棏婜娫拞傾僆僂儈僈儊偼塧傪怘傋偢偵僄僱儖僊乕傪愡栺偟偨峴摦傪偲傞偲偄傢傟偰偄傑偡丅偮傑傝丄偁傑傝嶻棏応偐傜棧傟側偄偙偲偑梊憐偝傟傑偡丅峴摦寳傪尒偰傒傞偲丄屄懱偺峴摦寳乮95%棙梡暘晍乯偼増娸偐傜6km偺娚徴抧懷撪偵偍偝傑偭偰偄傞偙偲偑暘偐傝傑偡丅僐傾僄儕傾乮50%棙梡暘晍丗摿偵棙梡偟偰偄傞応強乯偼丄嶻棏応偱偁傞僼乕儓儞搰偐傜俀倠倣埲撪偵廂傑偭偰偄傑偡丅傾儖僑僗僔僗僥儉偱僨乕僞傪庢摼偟偰偄傞偨傔丄嶻棏忋棨帪偵僨乕僞偑摼傗偡偄偙偲傪峫偊傞偲丄僐傾僄儕傾偑彫偝偔悇掕偝傟偰偄傞壜擻惈偑峫偊傜傟傑偡丅偟偐偟側偑傜丄嶻棏応廃曈傪曐岇嬫堟偲偟偰愝掕偡傞嵺偵偼丄偙偺峴摦寳悇掕寢壥乮峴摦寳偑増娸傛傝悢km撪偵偍偝傑傞偙偲乯偑戝偒側嵽椏偲側傞偙偲偼娫堘偄偁傝傑偣傫丅崱屻偼丄俧俹俽傾儖僑僗摍傪梡偄偰崅偄惛搙偺忣曬偱峴摦寳傪悇掕偡傞偙偲傗丄峴摦寳撪偱偳偺傛偆側峴摦傪偟偰偄傞偺偐挷傋傞昁梫偑偁傞偲峫偊傜傟傑偡丅
 丂
丂
恾俀丏僼乕儓儞搰偱嶻棏偟偨屄懱偺夞梀捛愓寢壥偐傜悇掕偟偨傾僆僂儈僈儊偺峴摦寳
丂
嶲峫暥專
Argos (1996) Argos Users Manual
丂